Robots parecidos a medusas podrían limpiar algún día los océanos del mundo
Anuncios



Roboticistas del Instituto Max Planck de Sistemas Inteligentes de Stuttgart han desarrollado un robot submarino inspirado en las medusas con el que esperan poder recoger algún día residuos del fondo del océano. El prototipo, casi insonoro, puede atrapar objetos bajo su cuerpo sin contacto físico, lo que permite interacciones seguras en entornos delicados como los arrecifes de coral. Jellyfish-Bot podría convertirse en una importante herramienta de remediación medioambiental.

Imagen simbólica
Computer-generated image
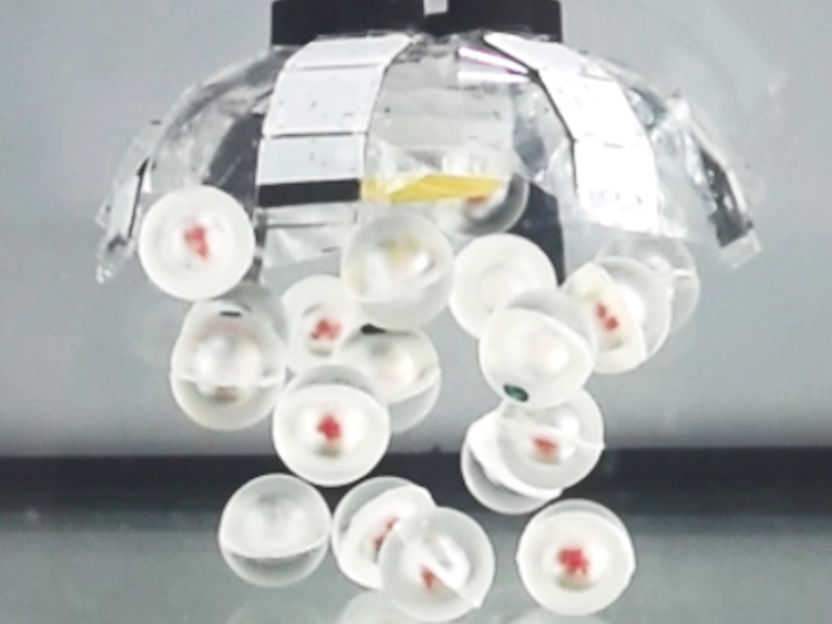
El robot-medusa recoge partículas de desecho
MPI-IS


La mayor parte del planeta está cubierta de océanos, por desgracia muy contaminados. Una de las estrategias para combatir los montones de residuos que se encuentran en estos ecosistemas tan sensibles -especialmente en torno a los arrecifes de coral- es emplear robots que se encarguen de la limpieza. Sin embargo, los robots submarinos existentes son en su mayoría voluminosos y de cuerpo rígido, incapaces de explorar y tomar muestras en entornos complejos y desestructurados, y ruidosos debido a los motores eléctricos o las bombas hidráulicas. Para conseguir un diseño más adecuado, los científicos del Instituto Max Planck de Sistemas Inteligentes (MPI-IS) de Stuttgart buscaron inspiración en la naturaleza. Configuraron un robot del tamaño de una mano, inspirado en las medusas, versátil, de bajo consumo y casi insonoro. Jellyfish-Bot es fruto de la colaboración entre los departamentos de Inteligencia Física y Materiales Robóticos del MPI-IS. El artículo "A Versatile Jellyfish-like Robotic Platform for Effective Underwater Propulsion and Manipulation" se publicó en Science Advances.
Para construir el robot, el equipo utilizó actuadores electrohidráulicos por los que fluye electricidad. Los actuadores actúan como músculos artificiales que impulsan al robot. Alrededor de estos músculos hay cojines de aire y componentes blandos y rígidos que estabilizan el robot y lo hacen impermeable. De este modo, la alta tensión que circula por los actuadores no puede entrar en contacto con el agua circundante. Una fuente de alimentación suministra periódicamente electricidad a través de finos cables, lo que hace que los músculos se contraigan y se expandan. Esto permite al robot nadar con gracia y crear remolinos bajo su cuerpo.

"Cuando una medusa nada hacia arriba, puede atrapar objetos a su paso al crear corrientes alrededor de su cuerpo. De este modo, también puede recoger nutrientes. Nuestro robot también hace circular el agua a su alrededor. Esta función es útil para recoger objetos como partículas de desecho. A continuación, puede transportar la basura a la superficie, donde más tarde puede ser reciclada. También es capaz de recoger muestras biológicas frágiles, como huevos de peces. Mientras tanto, no tiene ningún impacto negativo en el medio ambiente circundante. La interacción con las especies acuáticas es suave y casi silenciosa", explica Tianlu Wang. Es postdoctorando en el Departamento de Inteligencia Física del MPI-IS y primer autor de la publicación.
Su coautor, Hyeong-Joon Joo, del Departamento de Materiales Robóticos, prosigue: "Se calcula que el 70% de la basura marina se hunde en el lecho marino. Los plásticos constituyen más del 60% de esta basura y tardan cientos de años en degradarse. Por eso vimos la necesidad urgente de desarrollar un robot que manipulara objetos como la basura y los transportara hacia arriba. Esperamos que los robots submarinos puedan ayudar algún día a limpiar nuestros océanos".
Los Jellyfish-Bots son capaces de mover y atrapar objetos sin contacto físico, funcionando solos o con varios en combinación. Cada robot funciona más rápido que otros inventos comparables, alcanzando una velocidad de hasta 6,1 cm/s. Además, Jellyfish-Bot sólo necesita una potencia de entrada baja, de unos 100 mW. Y es seguro para las personas y los peces en caso de que algún día se rompa el material polimérico que aísla al robot. Además, el ruido del robot no se distingue de los niveles de fondo. De este modo, Jellyfish-Bot interactúa suavemente con su entorno sin perturbarlo, al igual que su homólogo natural.
El robot está formado por varias capas: unas le dan rigidez, otras sirven para mantenerlo a flote o aislarlo. Otra capa de polímero actúa como piel flotante. En medio de las distintas capas hay incrustados unos músculos artificiales accionados eléctricamente, llamados HASEL. Los HASEL son bolsas de plástico rellenas de dieléctrico líquido que están parcialmente cubiertas por electrodos. Al aplicar un alto voltaje a un electrodo, éste se carga positivamente, mientras que el agua que lo rodea se carga negativamente. Esto genera una fuerza entre el electrodo cargado positivamente y el agua cargada negativamente que empuja el aceite del interior de las bolsas hacia delante y hacia atrás, haciendo que las bolsas se contraigan y se relajen, como un músculo real. Los HASEL pueden soportar las elevadas tensiones eléctricas generadas por los electrodos cargados y están protegidos contra el agua por una capa aislante. Esto es importante, ya que nunca antes se habían utilizado músculos HASEL para construir un robot submarino.
El primer paso consistió en desarrollar el Jellyfish-Bot con un electrodo con seis dedos o brazos. En el segundo paso, el equipo dividió el electrodo único en grupos separados para accionarlos de forma independiente.
"Conseguimos agarrar objetos haciendo que cuatro de los brazos funcionaran como hélice y los otros dos como pinza. O actuamos sólo un subconjunto de los brazos, para dirigir el robot en distintas direcciones. También estudiamos cómo hacer funcionar un colectivo de varios robots. Por ejemplo, cogimos dos robots y les dejamos que recogieran una máscara, algo muy difícil para un solo robot. Dos robots también pueden cooperar para transportar cargas pesadas. Sin embargo, en este punto, nuestro robot-medusa necesita un cable. Esto es un inconveniente si realmente queremos utilizarlo algún día en el océano", afirma Hyeong-Joon Joo.
Quizá los cables que alimentan a los robots sean pronto cosa del pasado. "Nuestro objetivo es desarrollar robots inalámbricos. Por suerte, hemos dado el primer paso hacia este objetivo. Hemos incorporado todos los módulos funcionales, como la batería y las piezas de comunicación inalámbrica, para poder manipularlos sin cables en el futuro", prosigue Tianlu Wang. El equipo colocó una unidad de flotabilidad en la parte superior del robot y una batería y un microcontrolador en la inferior. Después se dieron un baño con su invento en el estanque del campus Max Planck de Stuttgart, y pudieron dirigirlo con éxito. Sin embargo, hasta ahora no habían podido dirigir el robot inalámbrico para que cambiara de rumbo y nadara en sentido contrario.
Conociendo al equipo, no tardarán mucho en conseguirlo.
Nota: Este artículo ha sido traducido utilizando un sistema informático sin intervención humana. LUMITOS ofrece estas traducciones automáticas para presentar una gama más amplia de noticias de actualidad. Como este artículo ha sido traducido con traducción automática, es posible que contenga errores de vocabulario, sintaxis o gramática. El artículo original en Inglés se puede encontrar aquí.




Más noticias del departamento ciencias





































