Microrobots autopropulsados
Anuncios



La mayoría de los materiales sintéticos, incluidos los de los electrodos de batería, las membranas poliméricas y los catalizadores, se degradan con el tiempo porque no tienen mecanismos internos de reparación. Si pudieras distribuir microrobots autónomos dentro de estos materiales, entonces podrías usar los microrobots para hacer reparaciones continuamente desde el interior. Un nuevo estudio del laboratorio de Kyle Bishop, profesor asociado de ingeniería química, propone una estrategia para los robots de microescala que pueden detectar los síntomas de un defecto material y navegar de forma autónoma hasta el sitio del defecto, donde se pueden realizar acciones correctivas.
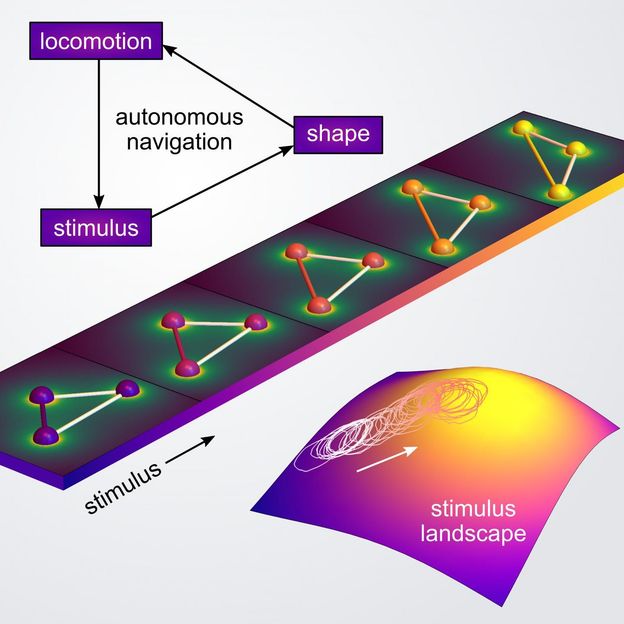
Este es un esquema del mecanismo de navegación autónomo a través de shapeshifting
Yong Dou/Columbia Engineering
Las bacterias de la natación buscan regiones de alta concentración de nutrientes mediante la integración de sensores químicos y motores moleculares, de manera muy parecida a la de un automóvil que utiliza información de cámaras y otros sensores para seleccionar una acción apropiada para llegar a su destino. Los investigadores han tratado de imitar estos comportamientos utilizando pequeñas partículas propulsadas por combustibles químicos u otros insumos de energía. Mientras que las variaciones espaciales en el medio ambiente (por ejemplo, en la concentración de combustible) pueden actuar para orientar físicamente la partícula y por lo tanto dirigir su movimiento, este tipo de navegación tiene limitaciones.
"Las partículas autopropulsadas existentes se parecen más a un tren desbocado que es conducido mecánicamente por los rieles de enrollamiento que a un coche autopropulsado que es guiado autónomamente por información sensorial", dice Bishop. "Nos preguntábamos si podríamos diseñar robots de microescala con sensores de material y actuadores que naveguen más como bacterias."
El equipo de Bishop está desarrollando un nuevo enfoque para codificar la navegación autónoma de microrobots que se basa en materiales que cambian de forma. Las características locales del entorno, como la temperatura o el pH, determinan la forma tridimensional de la partícula, que a su vez influye en su movimiento autopropulsado. Al controlar la forma de la partícula y su respuesta a los cambios ambientales, los investigadores modelan cómo los microrobots pueden ser diseñados para nadar hacia arriba o hacia abajo por los gradientes de estímulo, incluso aquellos demasiado débiles para ser sentidos directamente por la partícula.
"Por primera vez, mostramos cómo se pueden utilizar materiales sensibles como ordenadores de a bordo para robots de microescala, más pequeños que el grosor de un cabello humano, que están programados para navegar de forma autónoma", dice Yong Dou, coautor del estudio y estudiante de doctorado en el laboratorio de Bishop. "Tales microrobots podrían realizar tareas más complejas como la detección distribuida de defectos materiales, la entrega autónoma de carga terapéutica y la reparación a petición de materiales, células o tejidos."
El equipo de Bishop está preparando experimentos para demostrar en la práctica su estrategia teórica de navegación para microrobots, utilizando materiales que cambian de forma como elastómeros de cristal líquido y aleaciones de memoria de forma. Esperan mostrar que los experimentos demostrarán que las micropartículas sensibles a los estímulos y que cambian de forma pueden utilizar la retroalimentación de ingeniería entre la detección y el movimiento para navegar de forma autónoma.
Nota: Este artículo ha sido traducido utilizando un sistema informático sin intervención humana. LUMITOS ofrece estas traducciones automáticas para presentar una gama más amplia de noticias de actualidad. Como este artículo ha sido traducido con traducción automática, es posible que contenga errores de vocabulario, sintaxis o gramática. El artículo original en Inglés se puede encontrar aquí.
Publicación original


Más noticias del departamento ciencias




































