Los colectivos de microrobots muestran patrones de movimiento versátiles
Un modelo para futuras aplicaciones biomédicas y medioambientales
Anuncios



El comportamiento colectivo y los patrones de los enjambres se encuentran en toda la naturaleza. Los robots también pueden programarse para actuar en enjambres.
Los colectivos de microrobots muestran patrones de movimiento versátiles
MPI für Intelligente Systeme
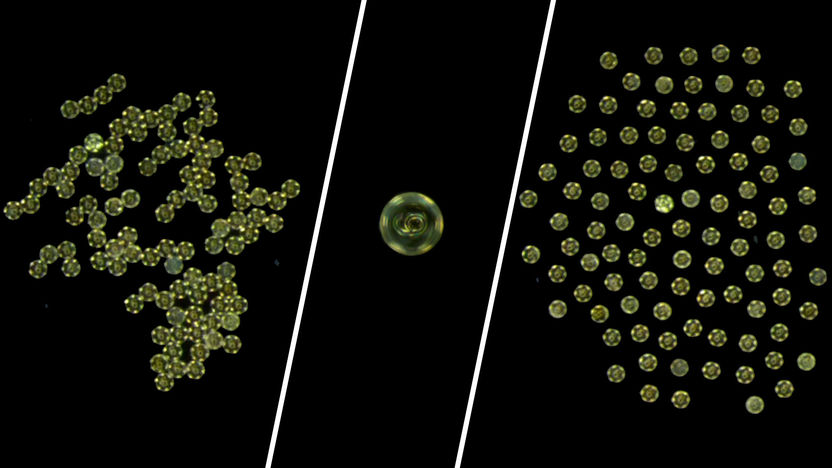
Investigadores del Instituto Max Planck de Sistemas Inteligentes (MPI-IS), la Universidad de Cornell y la Universidad Jiao Tong de Shanghai han desarrollado colectivos de microrobots que pueden moverse en cualquier formación deseada. Las partículas en miniatura son capaces de reconfigurar su comportamiento de enjambre de forma rápida y robusta. Flotando en la superficie del agua, los versátiles discos de microrobots pueden girar en círculos, bailar el boogie, agruparse en un grupo, extenderse como un gas o formar una línea recta como cuentas en una cuerda.
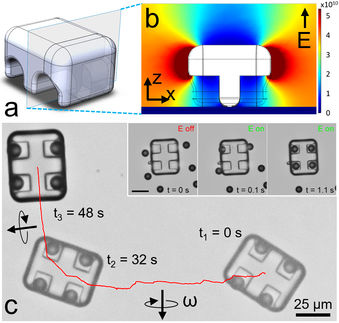
Cada robot es un poco más grande que el ancho de un cabello. Se imprimen en 3D con un polímero y luego se recubren con una fina capa superior de cobalto. Gracias al metal, los microrobots se convierten en imanes en miniatura. Mientras tanto, rodean el dispositivo unas bobinas de alambre que crean un campo magnético cuando la electricidad fluye a través de ellas. El campo magnético permite dirigir con precisión las partículas alrededor de un charco de agua de un centímetro de ancho. Cuando forman una línea, por ejemplo, los investigadores pueden mover los robots de forma que "escriban" letras en el agua. El proyecto de investigación de Gaurav Gardi y el profesor Metin Sitti, del MPI-IS, Steven Ceron y la profesora Kirstin Petersen, de la Universidad de Cornell, y el profesor Wendong Wang, de la Universidad Jiao Tong de Shanghai, titulado "Microrobots colectivos con morfologías, comportamientos y funciones reconfigurables" se publicó en Nature Communications el 26 de abril de 2022.
El comportamiento colectivo surge de las interacciones entre los robots
El comportamiento colectivo y los patrones de los enjambres se encuentran en toda la naturaleza. Una bandada de pájaros se comporta como un enjambre, al igual que un banco de peces. Los robots también pueden programarse para actuar en enjambres, y ya se les ha visto hacerlo de forma destacada. Una empresa de tecnología presentó recientemente un espectáculo de luces con drones que le valió un récord mundial Guinness al programar varios cientos de drones y hacerlos volar uno al lado del otro, creando asombrosos patrones en el cielo nocturno. Cada uno de los drones de este enjambre estaba dotado de una potencia de cálculo que lo dirigía en todas las direcciones posibles. ¿Pero qué pasa si la partícula individual es tan pequeña que la computación no es una opción? Cuando un robot tiene apenas 300 micrómetros de ancho, no se puede programar con un algoritmo.
Para compensar la falta de computación entran en juego tres fuerzas diferentes. Una es la fuerza magnética. Dos imanes con polos opuestos se atraen. Dos polos idénticos se repelen. La segunda fuerza es el entorno fluido; el agua que rodea los discos. Cuando las partículas nadan en un remolino de agua, desplazan el agua y afectan a las demás partículas circundantes del sistema. La velocidad del remolino y su magnitud determinan cómo interactúan las partículas. En tercer lugar, si dos partículas flotan una al lado de la otra, tienden a derivar una hacia la otra: doblan la superficie del agua de tal manera que se juntan lentamente. Los científicos y los amantes de los cereales llaman a esto el efecto cheerio: si dejas que dos cheerios floten en la leche, pronto chocarán entre sí. Por otro lado, este efecto también puede hacer que dos cosas se repelan (prueba con una horquilla y un cheerio).
Las tres fuerzas permiten la reconfiguración
Los científicos utilizan las tres fuerzas para crear un patrón de movimiento coordinado y colectivo para varias docenas de microrobots como un solo sistema. Un vídeo muestra cómo los científicos dirigen los robots a través de un parcour, mostrando la formación que mejor se adapta a la carrera de obstáculos, por ejemplo, cuando entran en un pasillo estrecho, los microrobots se alinean en fila india y se dispersan de nuevo al salir. Los científicos también pueden hacer bailar a los robots, solos o en pareja. Además, muestran cómo introducen una diminuta bola de plástico en el recipiente de agua y luego agrupan a los robots para que empujen la bola flotante. Pueden colocar las diminutas partículas dentro de dos engranajes y mover las partículas de forma que hagan girar ambos engranajes. También es posible un patrón más ordenado en el que cada partícula mantiene una distancia idéntica a su vecina. Todos estos modos de locomoción y formaciones diferentes se consiguen mediante computación externa: se programa un algoritmo para crear un campo magnético giratorio u oscilante que desencadena el movimiento y la reconfigurabilidad deseados.
"Dependiendo de cómo cambiemos los campos magnéticos, los discos se comportan de forma diferente. Vamos afinando una fuerza y luego otra hasta conseguir el movimiento que queremos. Si giramos el campo magnético dentro de las bobinas con demasiada fuerza, la fuerza que provoca el movimiento del agua es demasiado fuerte y los discos se alejan unos de otros. Si giramos con demasiada lentitud, el efecto cheerio que atrae las partículas es demasiado fuerte. Tenemos que encontrar el equilibrio entre los tres", explica Gaurav Gardi. Es estudiante de doctorado en el departamento de Inteligencia Física del MPI-IS y uno de los dos autores principales de la publicación junto con Steven Ceron, de la Universidad de Cornell.
Un modelo para futuras aplicaciones biomédicas y medioambientales
El escenario futuro de este tipo de colectivos microrobóticos es ir aún más pequeños. "Nuestra visión es desarrollar un sistema aún más diminuto, hecho de partículas de sólo un micrómetro de tamaño. Estos colectivos podrían adentrarse en el cuerpo humano y navegar por entornos complejos para administrar fármacos, por ejemplo, para obstruir o desobstruir conductos, o para estimular una zona de difícil acceso", afirma Gardi.
"Los colectivos de robots con transiciones robustas entre comportamientos de locomoción son muy raros. Sin embargo, estos sistemas versátiles son ventajosos para operar en entornos complejos. Estamos muy contentos de haber conseguido desarrollar un colectivo tan robusto y reconfigurable a la carta. Consideramos que nuestra investigación es un proyecto para futuras aplicaciones biomédicas, tratamientos mínimamente invasivos o la recuperación del medio ambiente", añade Metin Sitti, que dirige el Departamento de Inteligencia Física y es pionero en el campo de la robótica a pequeña escala y la inteligencia física.
Nota: Este artículo ha sido traducido utilizando un sistema informático sin intervención humana. LUMITOS ofrece estas traducciones automáticas para presentar una gama más amplia de noticias de actualidad. Como este artículo ha sido traducido con traducción automática, es posible que contenga errores de vocabulario, sintaxis o gramática. El artículo original en Inglés se puede encontrar aquí.
Publicación original
Anuncios



Más noticias del departamento ciencias




































